Daniel
Daniel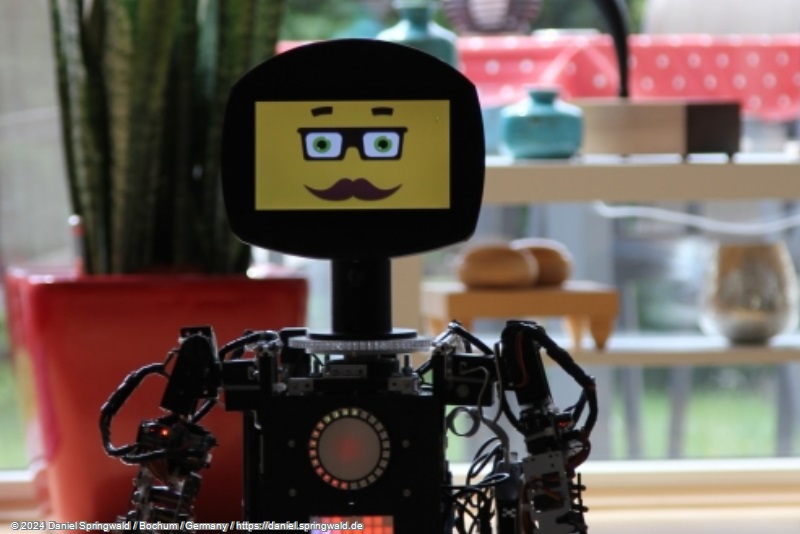
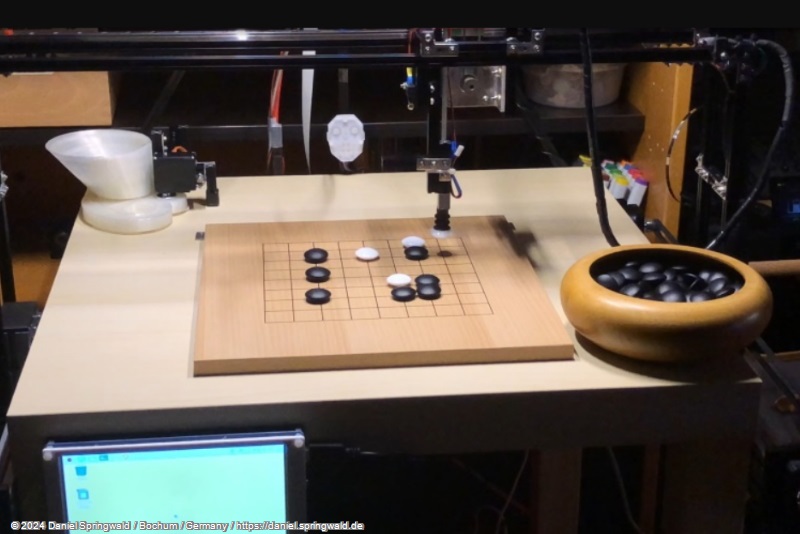
A raspberry pi and roomba robot
Roobert V2
Roobert on the Maker Faire Hannover 2018:

Read all articles about Roobert V2:
Roobert V1

Read all articles about Roobert V1:
- Introduction and head
- Neck design and movement
- The chassis
- Moving the head up and down
- Hands and arms
- 3d sensor
- The front RGB LED display
Video:
Impressions:






Shopping list (only the primary parts):
Head
Neck
- 2 x Micro Taster (as end stop detectors)
- 2 x PCF8574 IO Expansion Board 8-bit I/O Expander for I2C Bus
- 1 x Grove - I2C Motor Driver
- 2 x DC 5V 4 - Phase 5 Stepper Motor 28BYJ-48 + ULN2003 to move the head up/down
- 1 x QSH4218-35-026 Trinamic stepper motor to move the head left/right
- 1 x UCF204 Square Flange Ball Bearing 4-Bolt 20mm
Chassis
Body
- A set of Makerbeam
- 1 x NeoPixel 8x8 - 64 RGB LED Pixel Matrix
3D-Sensor
- 2 x Frontier TowerPro SG92R Micro Digital Servo
- 1 x Ultrasonic Sensor
- 1 x Servo holder
- 1 x SunFounder PCA9685 16 Channel 12 Bit PWM Servo Driver
Miscellaneous
Roobert source code
Other Software to install on the RasPi
- OpenCV
- SVOX-Pico-TTS-Engine