Daniel
Daniel show english version
show english version 
Inzwischen bin ich offenbar Star Wars Universum gefangen😉: Nachdem meine letzten beiden animatronischen Figuren jeweils ein Grogu waren, habe ich mich nun an einen weiteren Star Wars Charakter gewagt: Einen PIP Reparatur-Droiden aus der Serie "The Acolyte".
Dieses Mal bin ich glücklicherweise nicht wieder erst drei Jahre nach dem Hype auf die Idee gekommen, sondern habe die Figur bereits in den ersten Wochen der Ausstrahlung der Serie "The Acolyte" für mich entdeckt.
Ein erstes Video von meinem fertigen, animatronischen PIP ist hier zu sehen:
Statischer Größen- und Farben-Double
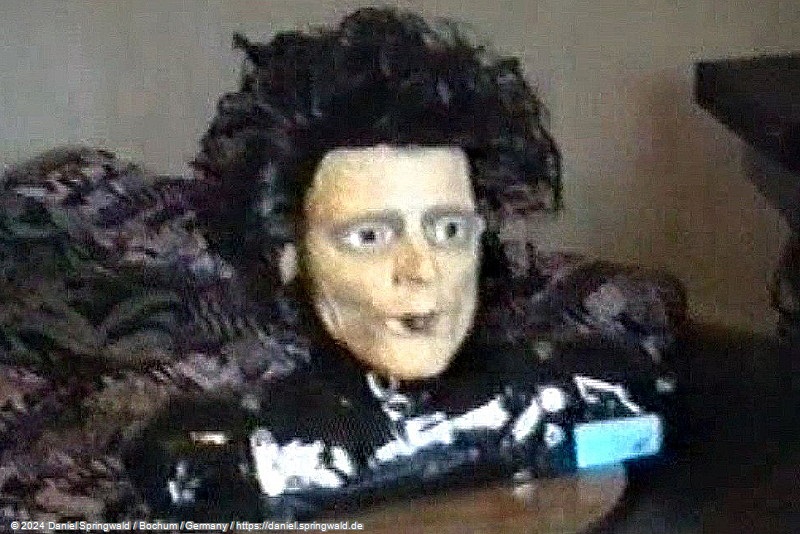
Dieses Mal habe ich als erstes einen statischen Dummy gebaut, um die Größe und die Farben des Droiden zu testen und damit herum zu experimentieren. Insbesondere die Frage, wie viel Mechanik in den Körper passen kann, ist allein am Computer manchmal schwer zu beantworten.
Zusammenbau des Dummies:



Aufbau
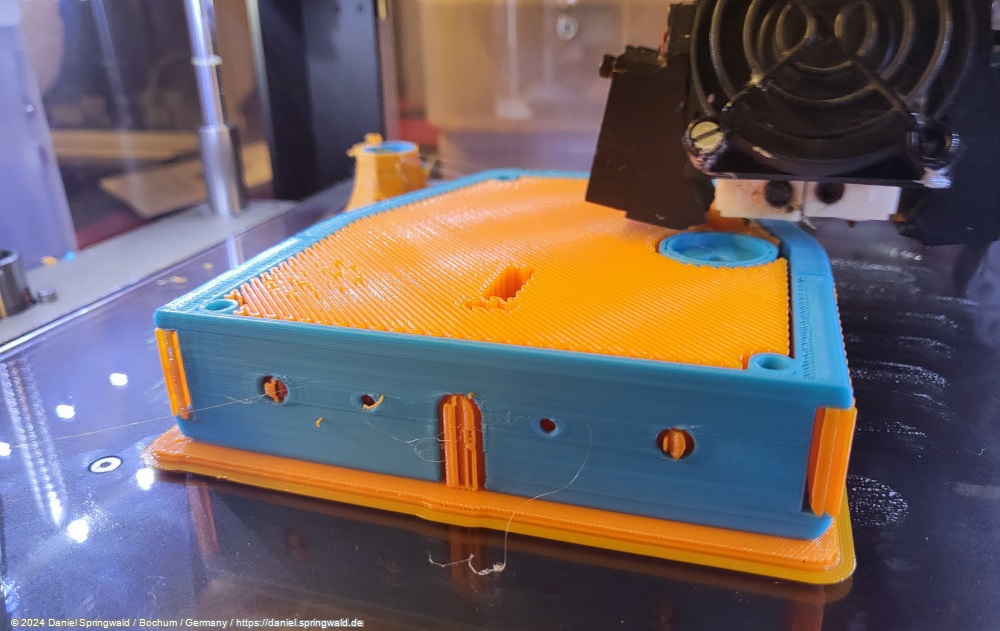
Wie schon beim Grogu habe ich auch hier wieder einen 3D-Drucker verwendet, um die Teile für den Droiden zu fertigen. Das grundlegende 3D-Modell habe ich vom 3D-Künstler NerdRebelArt erworben und entsprechend verändert.
Eigentlich bleibt nur die äußere Form - innen ist alles durch Mechanik und Löcher z.B. für Schrauben und Lautsprecher ergänzt worden.

Glücklicher Weise kann mein 3D-Drucker mit mehreren Farben gleichzeitig drucken, so dass ich die Farben orange und blau des Droiden direkt mitdrucken konnte. Das spart mir das spätere Lackieren oder zusammenkleben aus mehreren Teilen.
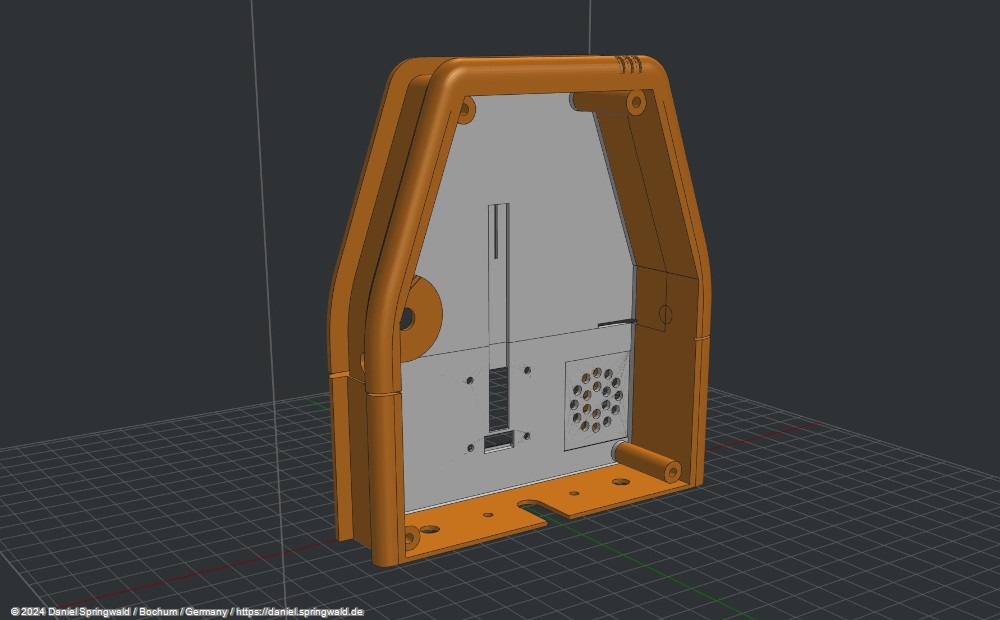
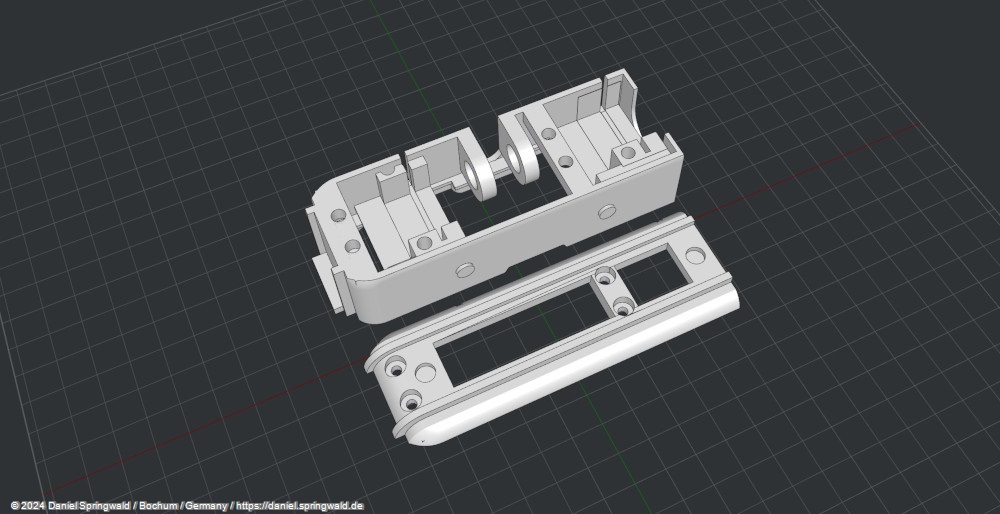
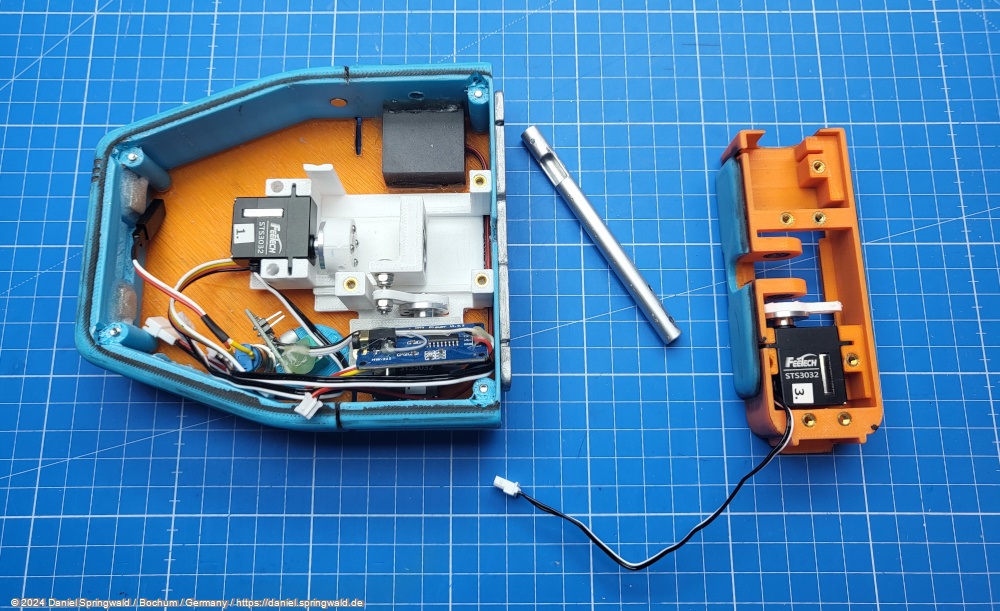
Körper
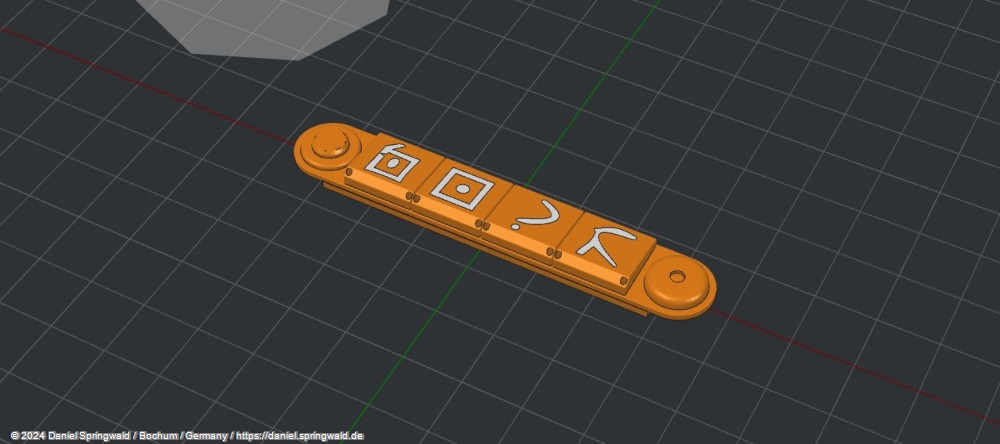
Den Körper des Droiden habe ich in zwei Teile aufgeteilt: Den primären Körper, der die meisten Komponenten enthält und eine Frontplatte, die nur das Tastenfeld inklusive RGB-LEDs trägt. Beides wird mit 3mm Schrauben und eingeschweißten Gewindeeinsätzen zusammengehalten.
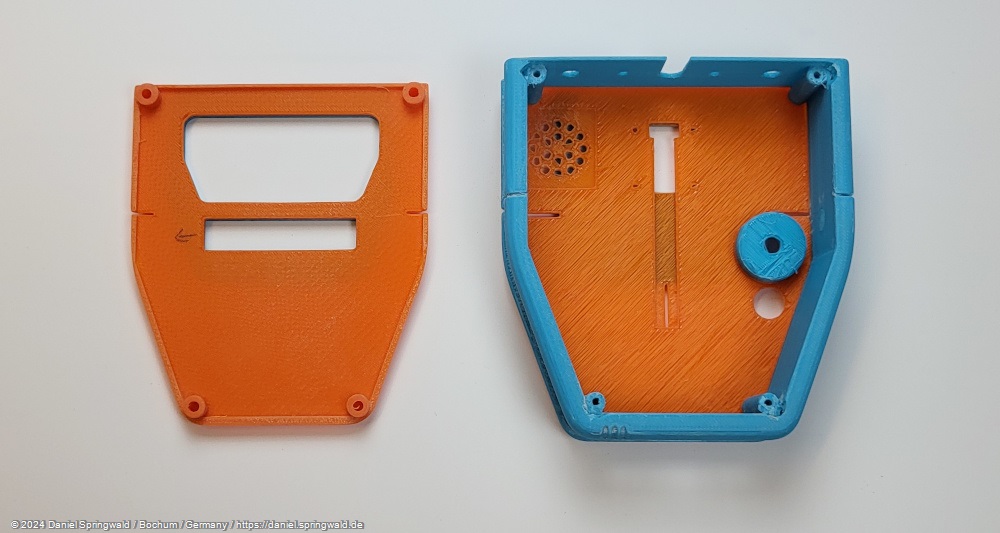
Für den passenden "used look" müssen die 3D-Druck-Teile noch geschliffen und "aged" werden. Dazu habe ich in alle Vertiefungen mit einem Pinsel dünn schwarze Farbe aufgetragen und dann wieder grob abgewischt. Dadurch bleibt die Farbe nur in den Vertiefungen und lässt den Droiden "abgenutzt" aussehen. Ein paar hinzugefügte Kratzer und Schrammen runden das Bild ab.

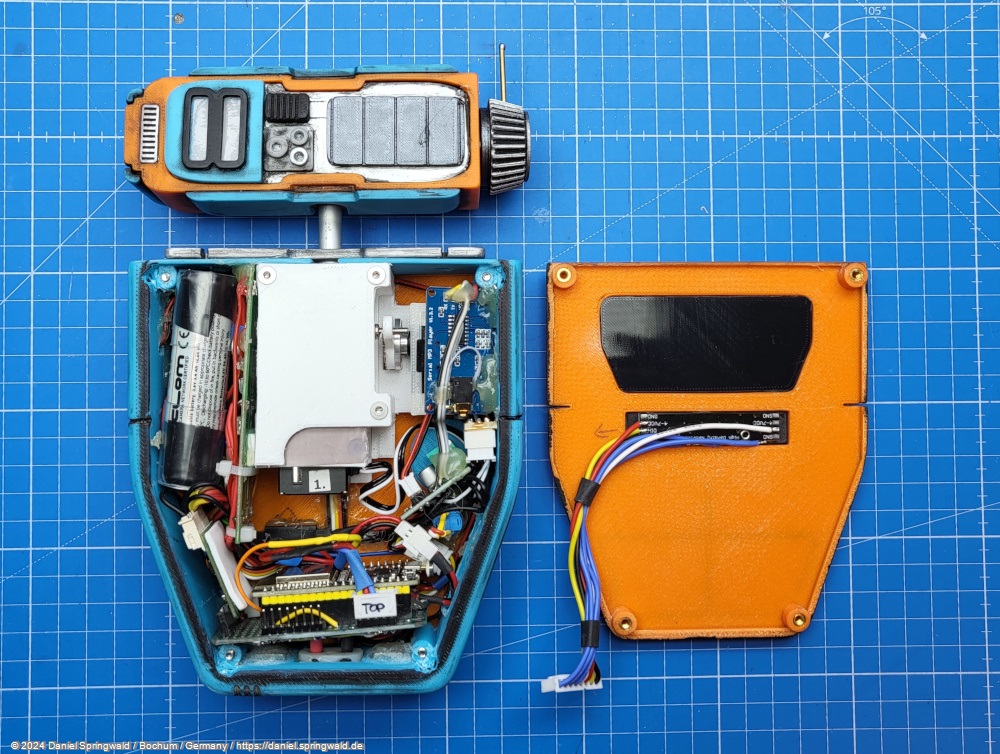
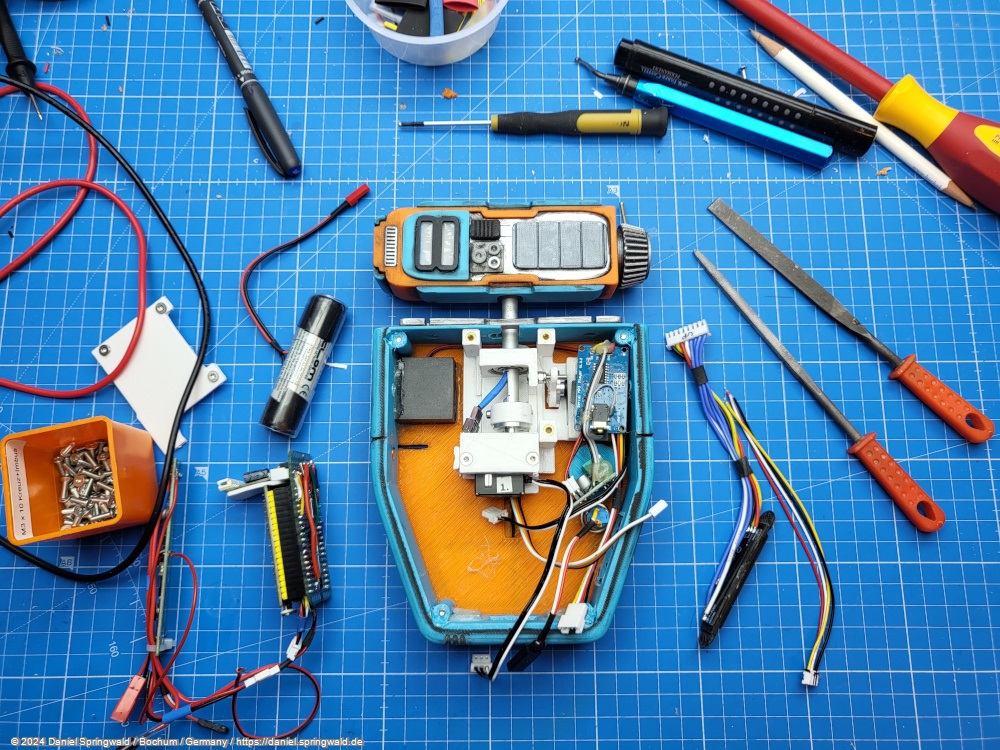
Im Körper ist kein cm³ mehr frei - alles ist vollgestopft mit Elektronik und Mechanik.
Das sind im einzelnen:
- Ein ESP32 , der die Steuerung übernimmt
- YX5300 UART Serial MP3 Player Modul , das die Sounds abspielt
- Mini PAM8403 Stereo Verstärker , der die Sounds verstärkt
- 8 Ohm 3 Watt Lautsprecher , der die Sounds wiedergibt
- Ein unterbrechungsfreies Lademodul , das den Akku lädt
- 18650 Li-Ion Akku , der die Spannung liefert
- Schalter , um den Droiden ein- und auszuschalten
- RGB-LEDs und Tasten
- Federkontakte für die Spannungsversorgung
- Mechanik für die Servos
- Servos für die Hals-Bewegungen links/rechts und hoch/runter

Kopf
Auch im Kopf ist leider kein Platz mehr frei, sonst hätte ich sehe gerne noch eine kleine Pumpe eingebaut, damit PIP wie in der Serie auch Flüssigkeiten aus seiner Antenne sprühen kann. Dafür hätte ich aber die Bewegung des Ohrs opfern müssen, die aber im Vergleich häufiger und sinnvoller eingesetzt werden kann. Auch eine kleine Mechanik, um Funken zu sprühen hatte ich schon vorbereitet, aber leider keinen Platz mehr dafür gefunden.
Insgesamt sind im Kopf verbaut:
- Servo für die Drehung des Ohrs
- Servo für die Neigung des Kopfes auf/ab
- RGB-LEDs für die "Augen"
- Mechanik für die Neigung des Kopfes mit Kugellagern und Kabelführung
Mechanik
Im PIP Droiden stecken 4 Servos und sind für folgende Bewegungen zuständig:
- Kopf nach links/rechts drehen
- Hals ausfahren/einfahren
- Kopf nach oben/unten neigen
- Das linke "Ohr" drehen
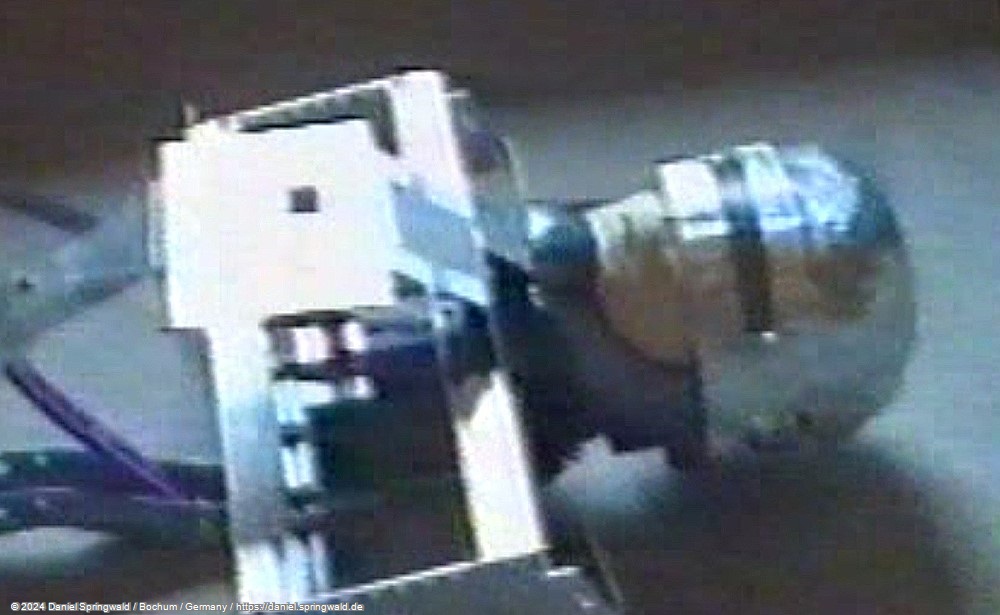
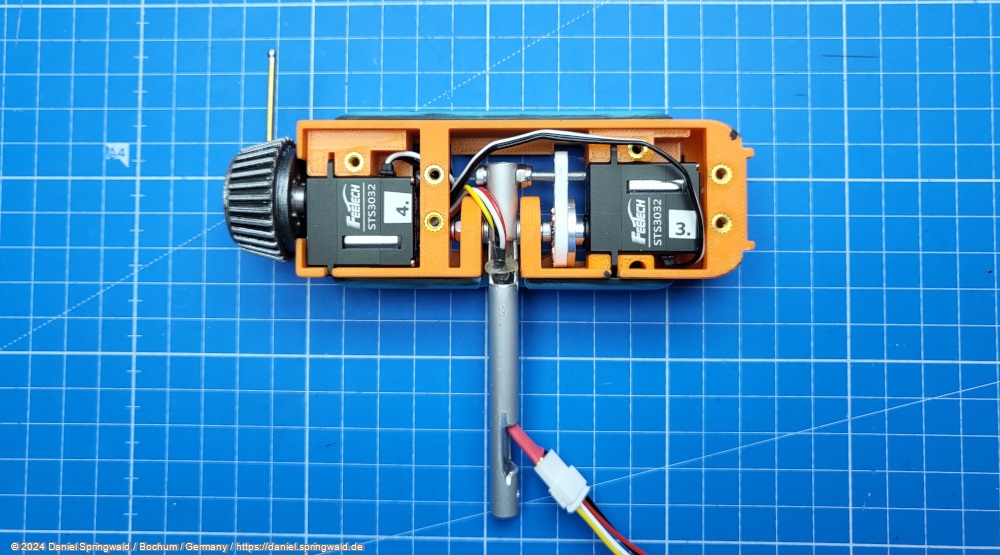
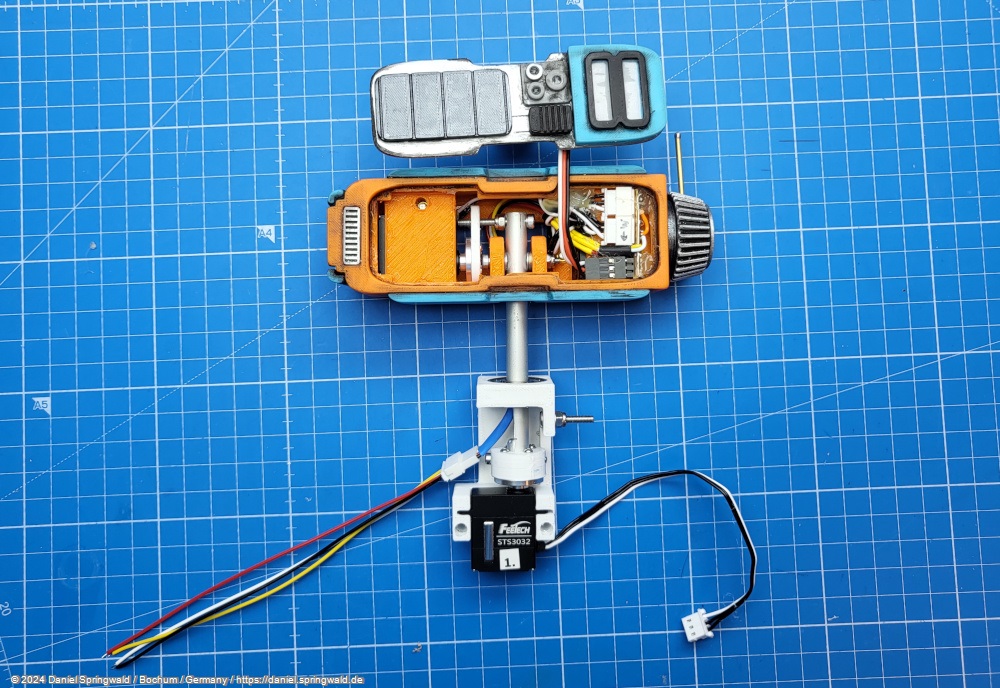
Dazu habe ich serielle Servos verwendet, da diese unter anderem sternförmig verkabelt werden können und so durch den dünnen Hals nur ein Kabel für beide Servos zum Controller führt. Als Typ habe ich zuerst Feetech SCS2332 Servos eingesetzt, bin aber später auf das baugleiche Modell STS3032 gewechselt, da die STS Variante auch Beschleunigung unterstützt und so die Bewegungen flüssiger wirken.
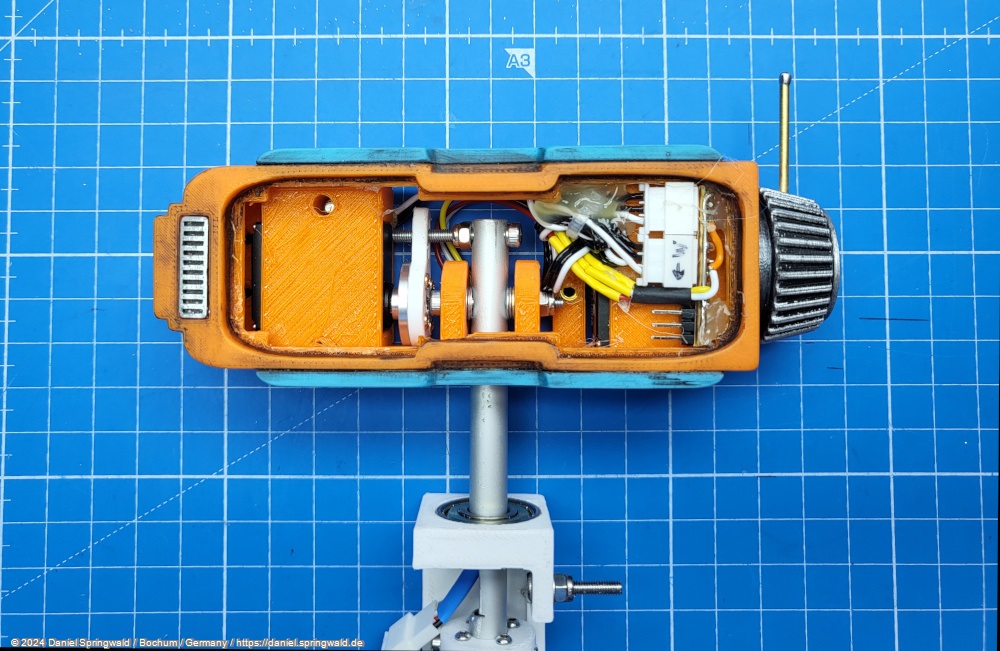
Der Hals besteht aus einer Aluminiumstange, die in einem 3D-gedruckten Gehäuse geführt wird. Im Kopf stecken zwei Kugellager, die die Stange führen und im Körper ein weiteres Kugellager.

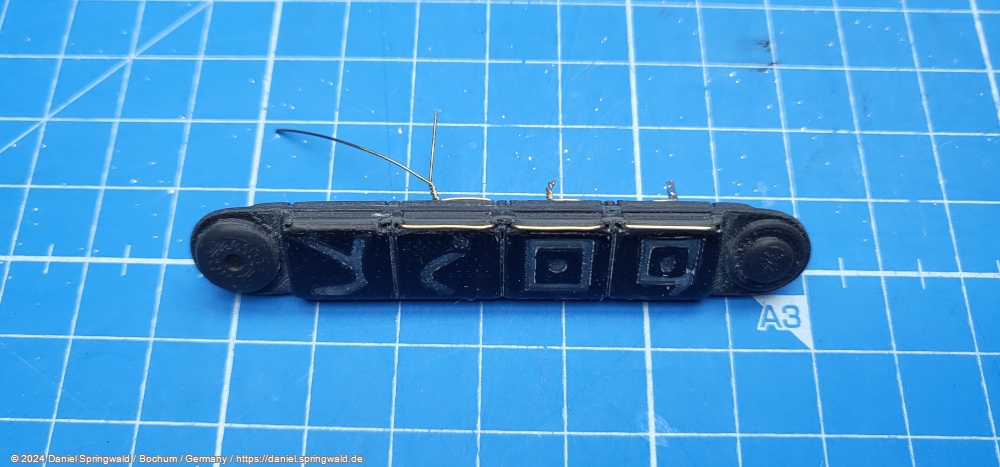
Tastenfeld
Vor am PIP Droiden sitzt ein Tastenfeld, das aus vier Tasten besteht. Am liebsten hätte ich dafür Taste verwendet, die man richtig drücken kann. Dafür habe ich aber nach Abzug der Mechanik und der Elektronik zu wenig Platz im Bauch des Droiden, wenn ich die Tasten auch noch beleuchten möchte. Daher habe ich mich für dafür entschieden, die Tasten auf Berührung reagieren zu lassen. Glücklicherweise hat der ESP32 bereits Touch-Pins, die ich dafür verwenden kann.

Optisch fällt dies dadurch auf, dass vor jeder Taste ein dünner Draht eingebaut ist.
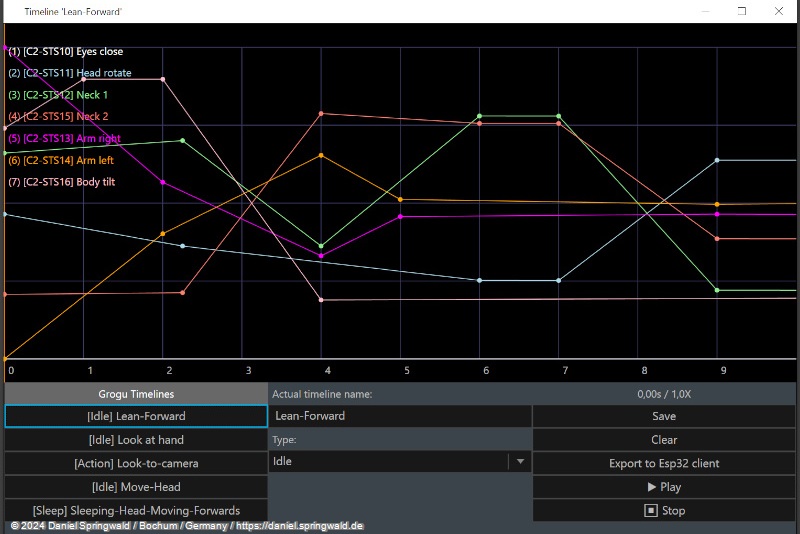
Software
Als Software für die Steuerung des PIP verwende ich (wie auch schon beim Grogu) meine Open-Source-Software Animatronic WorkBench.
Elektronische Bauteile
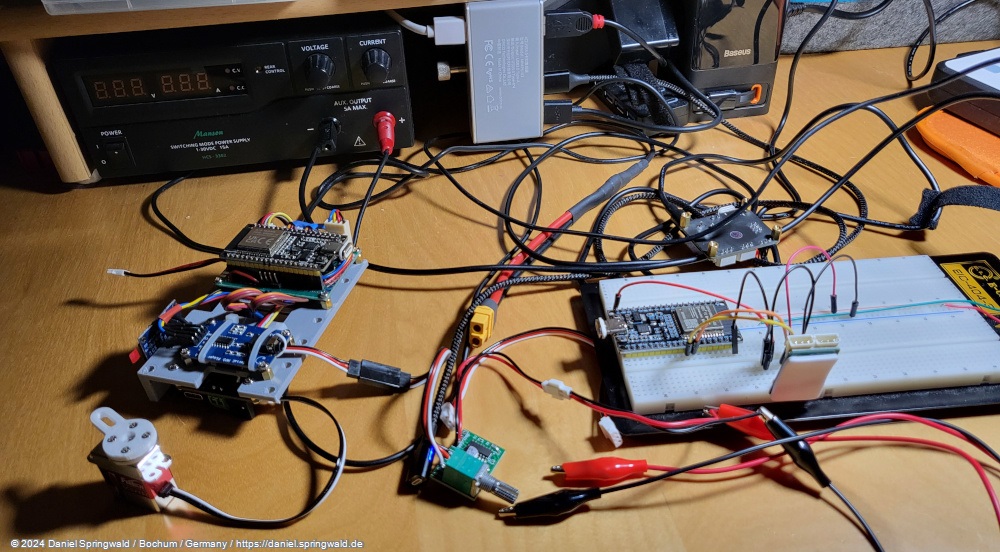
Im PIP steckt natürlich wieder einiges an Elektronik. Vor dem Einbau habe ich die Bauteile auf einem Breadboard getestet und programmiert.
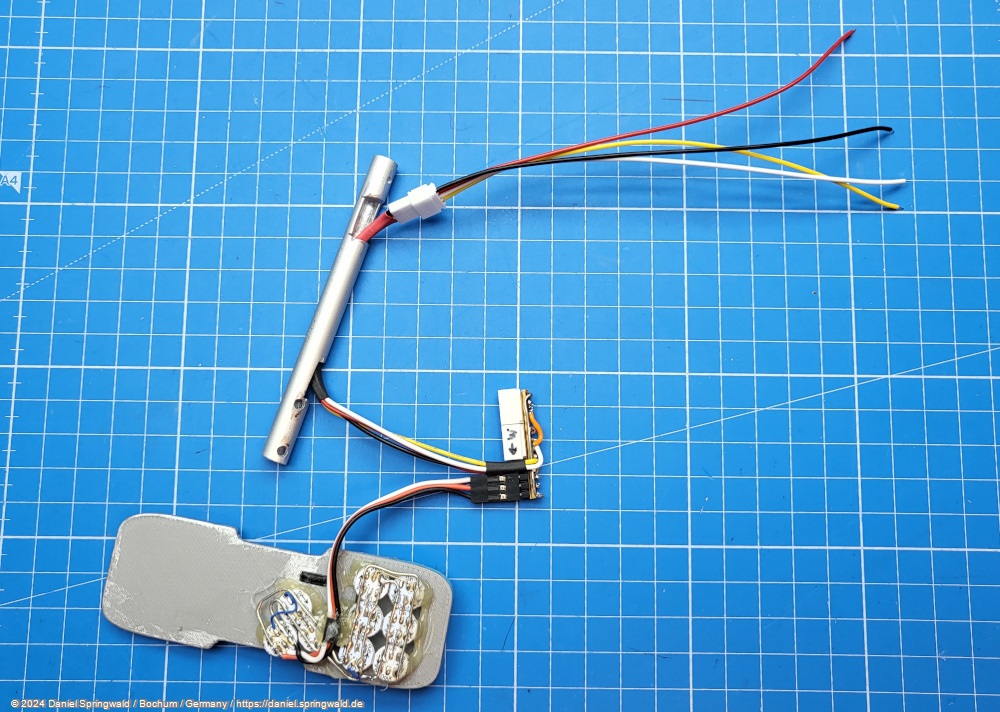
Einen kleinen aber leistungsfähigen Lautsprecher zu finden, war nicht einfach. Am Ende habe ich mich für diesen 8 Ohm 3 Watt Lautsprecher entschieden, der in den Kopf des Droiden passt.
Als MP3 Player habe ich (wie beim Grogu ein YX5300 UART Serial MP3 Player Modul verwendet. Dieses kann über eine serielle Schnittstelle angesteuert werden und spielt MP3 Dateien von einer Micro-SD Karte ab. Als Verstärker dient auch dieses Mal ein Mini PAM8403 Stereo Verstärker .
Spannungsversorgung
Innerhalb des PIP Droiden steckt ein 18650 Li-Ion Akku , der über einen unterbrechungsfreies Lademodul geladen wird. Daher werden alle Bauteile mit 5 Volt betrieben, obwohl die Servos mit bis zu 6 Volt betrieben werden könnten und dann mehr Leistung und Geschwindigkeit hätten.
Die Verbindung für die 5 Volt Spannung geschieht dabei über Federkontakte .
Pinbelegung des ESP32
| ESP32 PIN | Bauteil PIN | Bauteil |
|---|---|---|
| GPIO17 | RXD | MP3 Player |
| GPIO16 | TXD | MP3 Player |
| GND | GND | MP3 Player |
| 5V | VCC | MP3 Player |
| GPIO18 | RXD | SCS Servos Bus |
| GPIO19 | TXD | SCS Servos Bus |
| GND | GND | SCS Servos Bus |
| GPIO22 | SLC | i²c Bus |
| GPIO21 | SDA | i²c Bus |
| 3.3V | VCC | i²c Bus |
| GND | GND | i²c Bus |
| 5V | 5V out über Schottky-Diode | Spannungsquelle |
| GND | GND | Spannungsquelle |
| GPIO14 | Front Taster 1 | |
| GPIO27 | Front Taster 2 | |
| GPIO33 | Front Taster 3 | |
| GPIO32 | Front Taster 4 | |
| GPIO12 | Hand Halter Rückseite | |
| GPIO34 | per 220 Ohm auf 5V Docking | Erkennen, wenn eingedockt |
Tasche und Dockingstation
Für den Transport und die Aufbewahrung habe ich eine Tasche genäht, die auch gleichzeitig als Dockingstation dient.
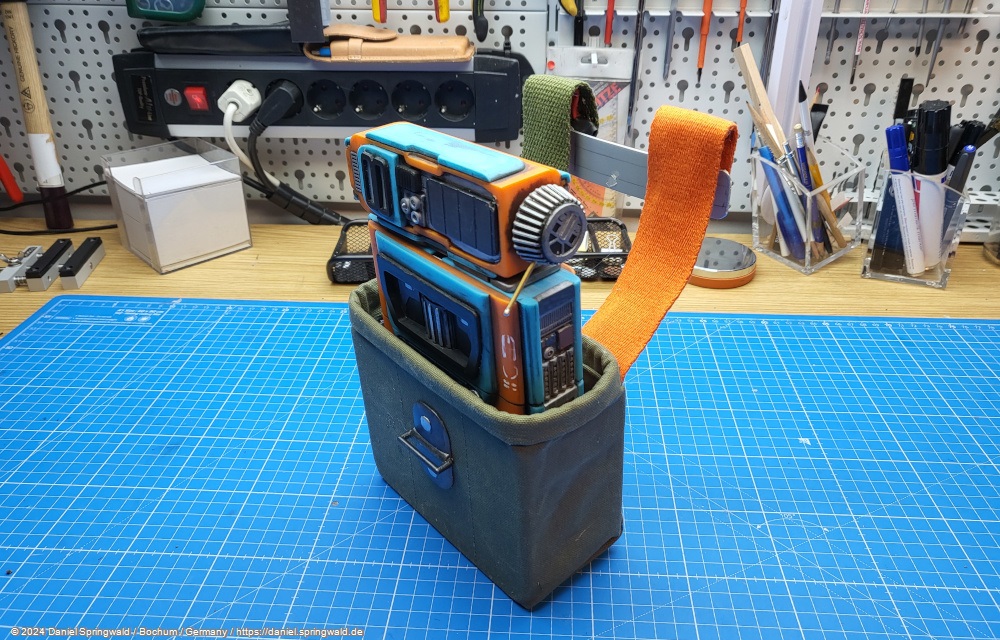

Die Tasche hat dazu einen USB-Anschluss und kann mit einer Powerbank betrieben werden, die zum Beispiel in der Hosentasche steckt.
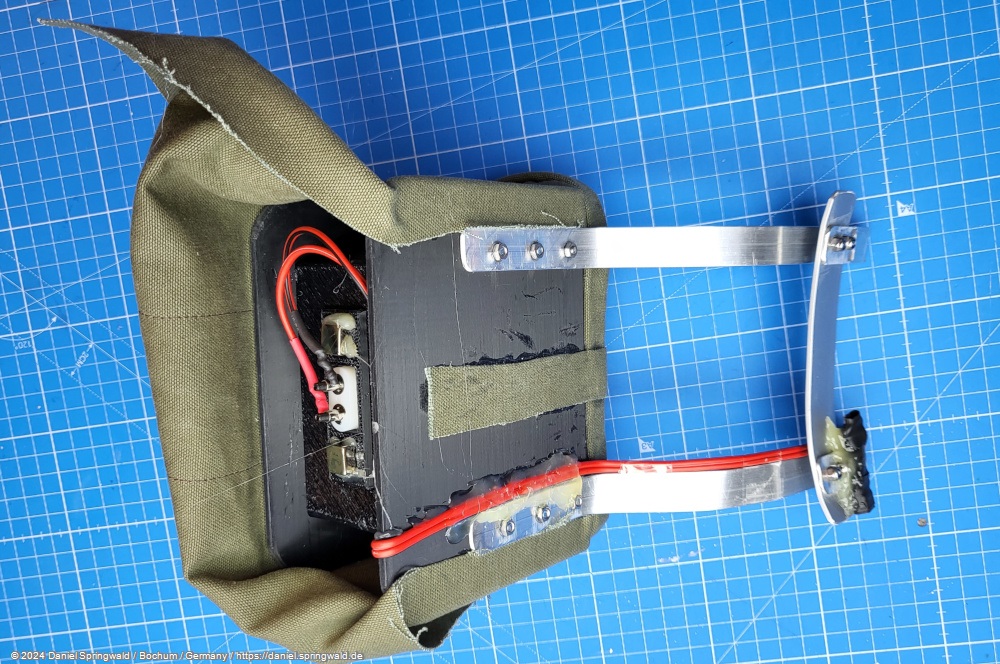
Auch die Dockingstation hat einen USB-Anschluss und kann mit einer Powerbank betrieben werden.

Für einfaches Laden unterwegs gibt es auch einen kleinen USB-Adapter, der ebenfalls magnetisch unten an den PIP Droiden geschnappt werden kann.

Kinderkrankheiten
Der Verstärker scheint mit seinen 3 Watt die Spannungsversorgung zu überfordern, wenn man die Lautstärke hoch aufdreht. Dann gibt es einen kompletten Spannungsabfall und der ESP32 startet komplett neu.
Im Oszilloskop sieht man sehr gut, dass die Spannung dabei komplett einbricht.
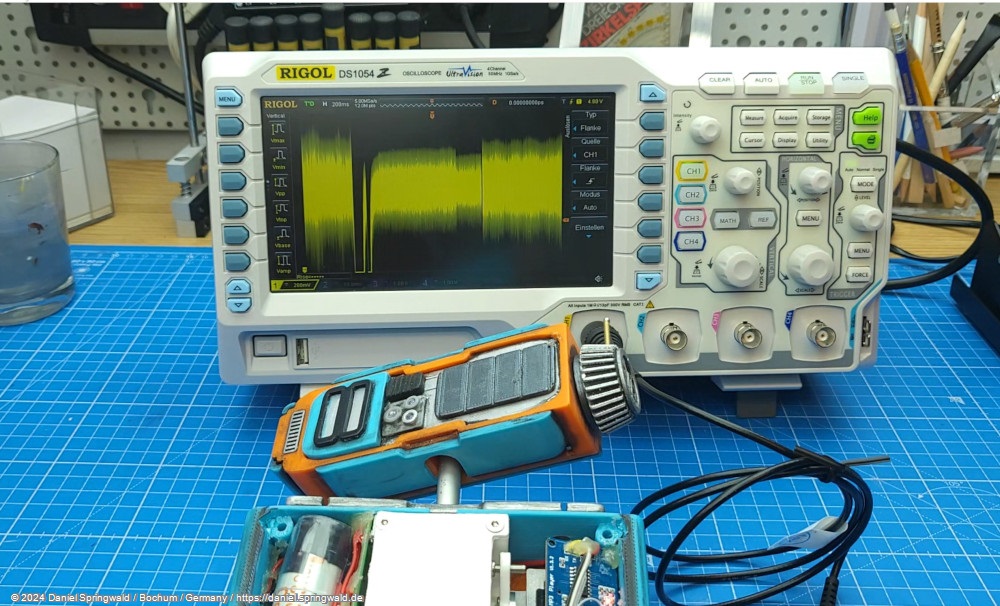
Daher habe ich den Verstärker mittels Widerstand zunächst auf ca. 50% Lautstärke begrenzt, was immer noch laut genug ist. Bei noch höherer Lautstärke hat der kleine Lautsprecher eh begonnen zu verzerren.
Auch bei den Kopf-Servos gab es anfangs Probleme, da zum Beispiel der Kopf beim links/rechts drehen leicht ruckelte. Ich dachte erst, dass die Servos zu schwach sind, aber tatsächlich ging das Problem direkt weg, wenn ich den Hals etwas festhielt und es damit eher schwerer machte. Meine aktuelle Annahme ist, dass sich die Bewegung durch ein unglückliches Zusammenspiel von Masseträgheit des Kopfes und der genauen Beschleunigung in einer Art Welle hochschaukelt. Aktuell löse ich das durch eine Dämpfung des Halses durch ein Stück Moosgummi, das ich in den Hals gesteckt habe und Anpassung der konkreten Drehgeschwindigkeit. Denn etwas schneller oder Langsamer klappt dann auch wieder prima.