
 Daniel
Daniel show english version
show english version 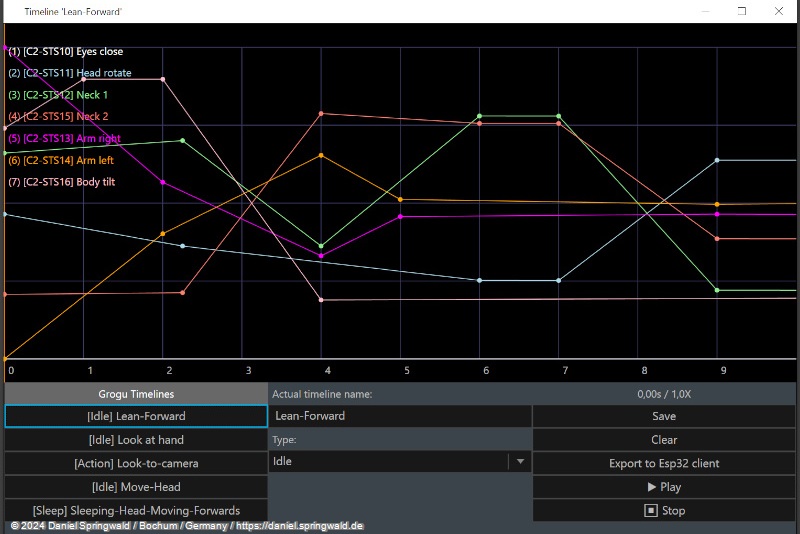
Tolle Animatronik ohne Programmierkenntnisse
- Manuelle Steuerung und 24/7 automatische animatronische Bewegungen
- Einfach zu bedienen, keine Programmierkenntnisse erforderlich
- Open Source, kostenlos zu verwenden
- Erstelle Bewegungen mit einem grafischen Editor
- Unterstützt günstige ESP32-Mikrocontroller, viele verschiedene Servomotoren und andere Hardware
- Soundwiedergabe synchronisiert mit den Bewegungen
Was ist Animatronic WorkBench?
Bei meinen bisherigen Animatronik-Projekten hatte ich immer viel Spaß mit der Hardware, dann allerdings in die Programmierung der Bewegungen nicht mehr so viel Elan gesteckt. Das ist eigentlich schade, da es ja gerade die Bewegungen sind, die die Figuren lebendig machen. Ein Grund lag darin, dass es eben wirklich Programmierung ist, d.h. jede Bewegung in Programmcode geschrieben werden musste. Das ist recht mühsam, wirkt im Ergebnis oft abgehackt und muss zum Ausprobieren immer wieder neu kompiliert und gestartet werden.
Aus diesem Grund habe ich die Software "Animatronic WorkBench" (AWB) entwickelt, die auf GitHub als Open Source herunter geladen werden kann. Damit kann man die Bewegungen von animatronischen Figuren ohne Programmierkenntnisse am Bildschirm erstellen.
Erste Schritte + Dokumentation
In der Dokumentation zur Animatronic WorkBench findest Du eine Anleitung, wie Du die Software installierst und ein erstes Projekt anlegst.
Dort kann man auch die unterstützte Hardware und die FAQ finden.
Außerdem gibt es eine Anleitung zur Erstellung von Timelines und zum Export des Projekts für ESP32 Mikrocontroller.
Zum Projekt gibt es auch ein kurzes YouTube-Interview von der MakerFaire 2023:






