Daniel
Daniel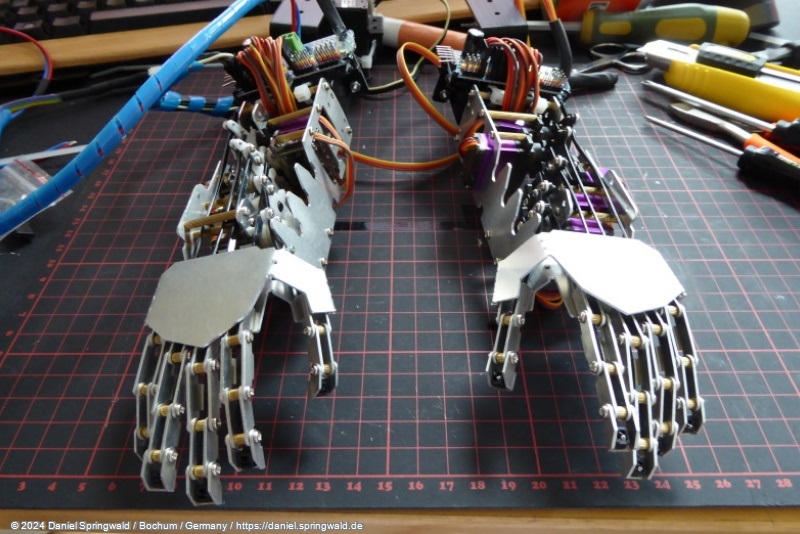
(see all parts of "building a home robot")
I wanted Roobert to get two identical hands with separate moveable fingers.
Because of this (and the small size) I decided to use a commercial construction kit instead of designing and constructing the hands on my own.
Although it was a construction kit it was fun for hours to assemble the hands:



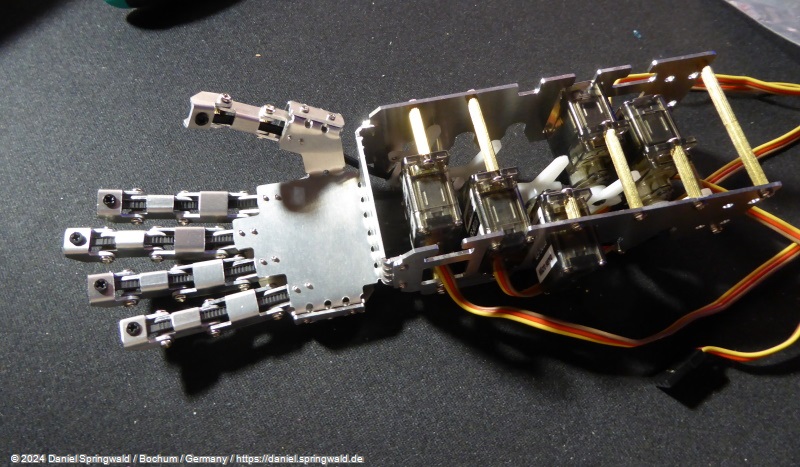
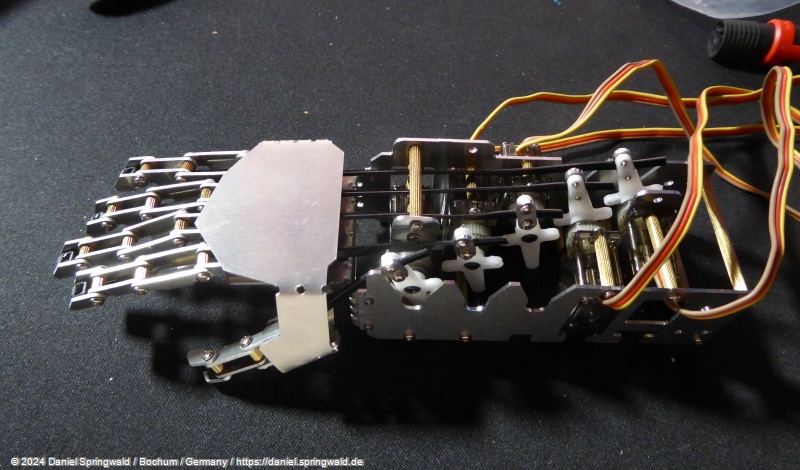
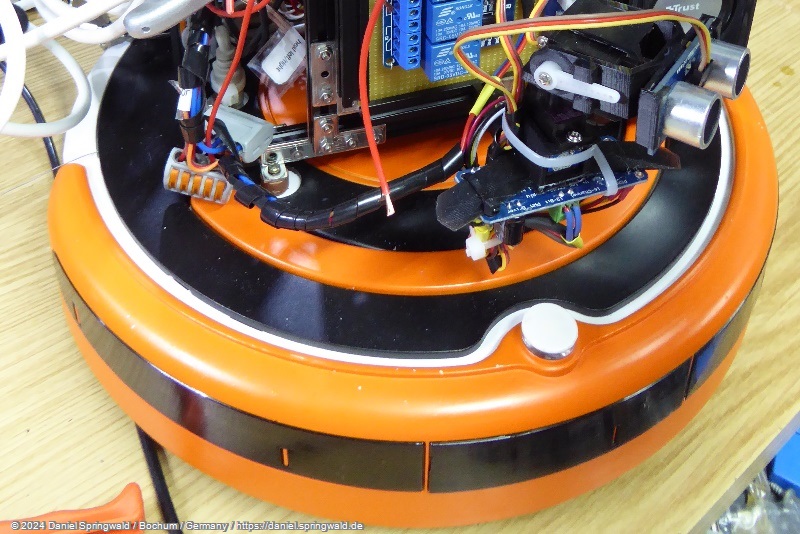
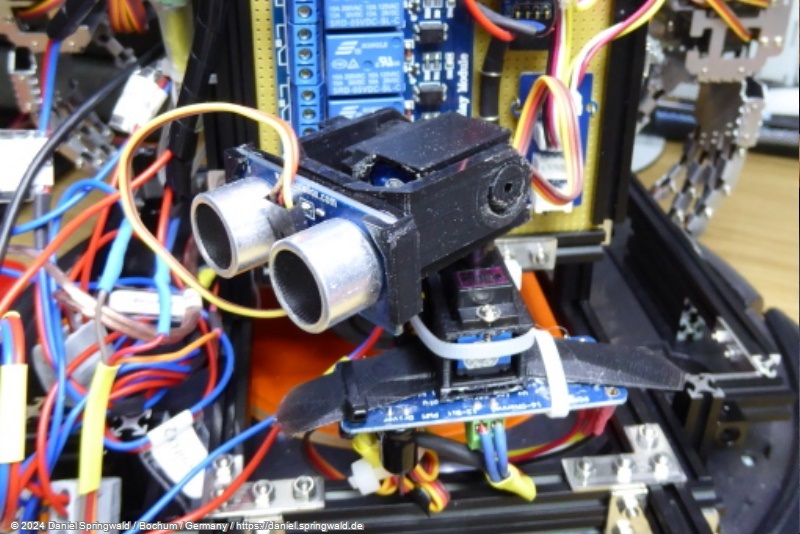
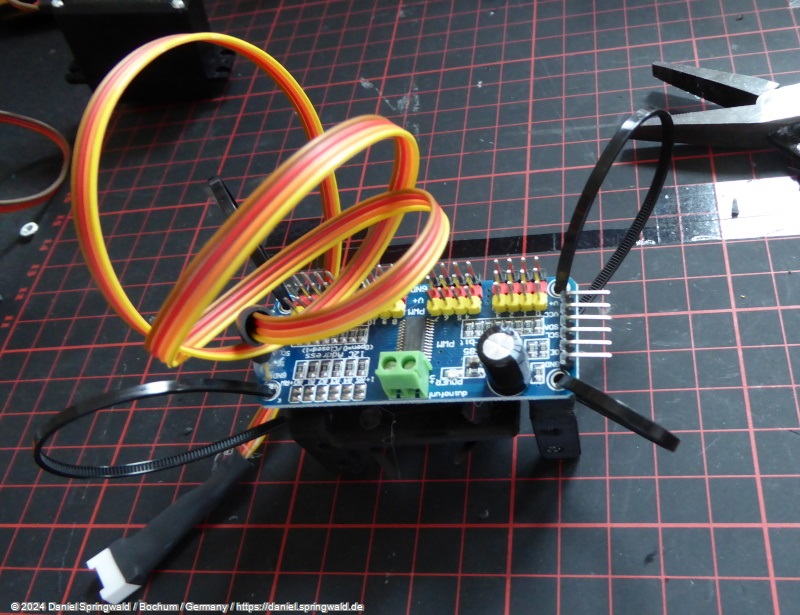
Each arm is constructed from the hand construction kit, 3 servos, 3d printed servo brackets and an I2C servo controller. Because the servo controller seemed to be unable to shut down the servo power, I attached a relays for each arm to turn the servo power on/on.
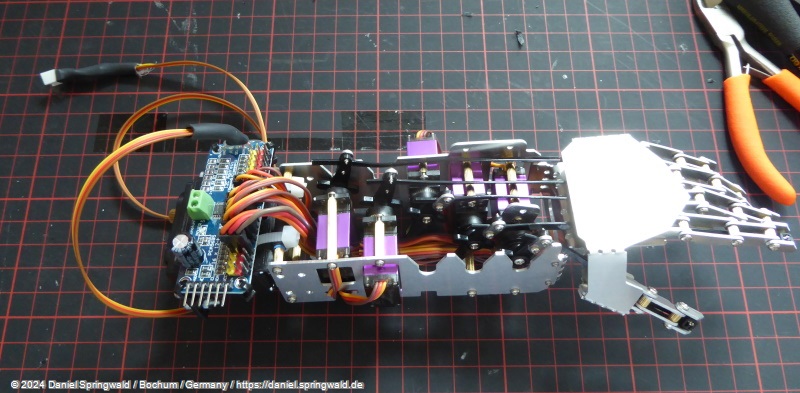
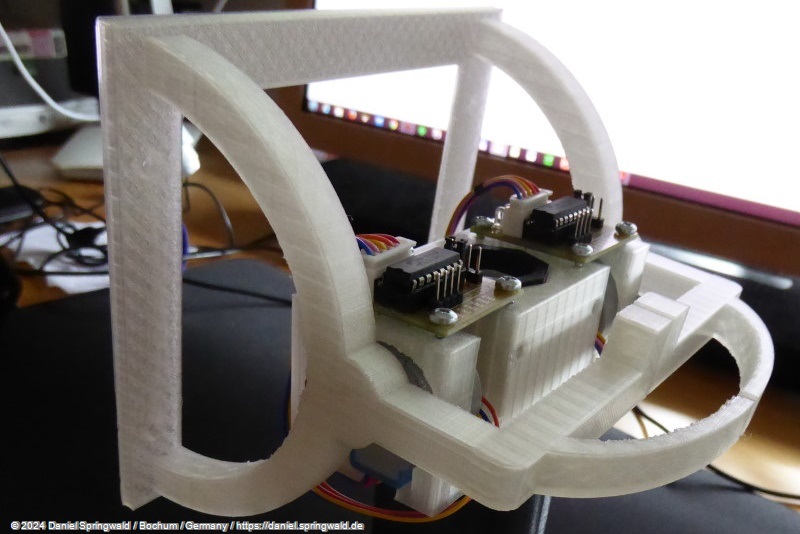
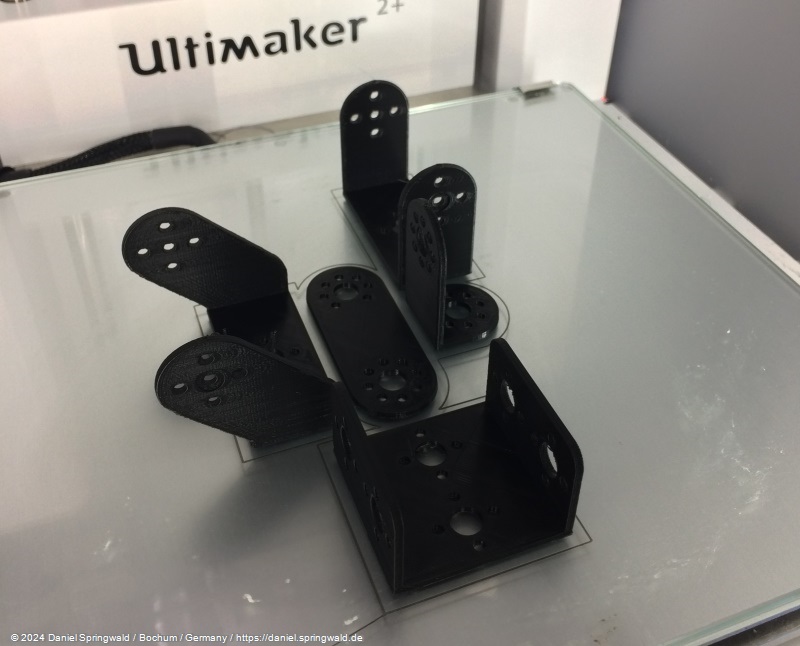
The servo holder for the upper arm parts are printed in 3D:
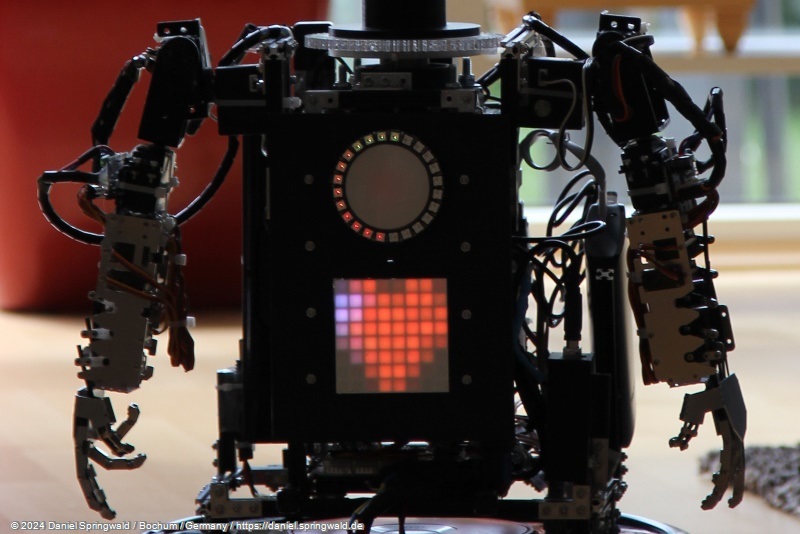
The complete arms:
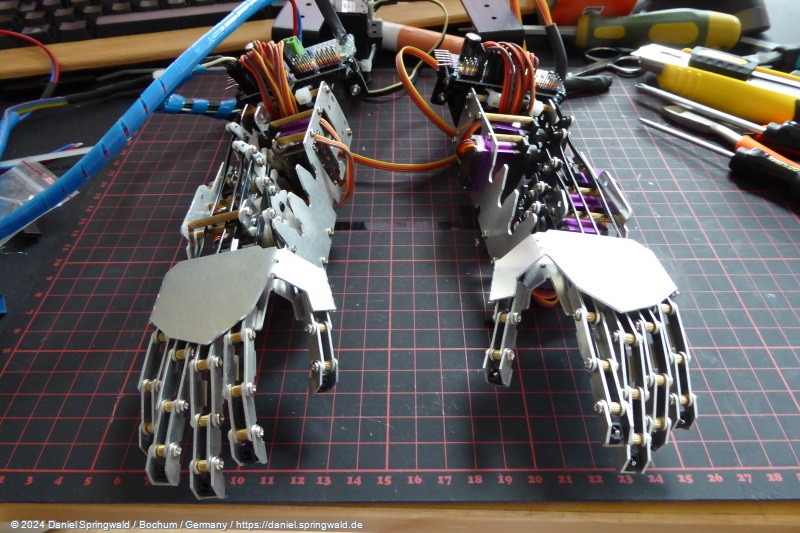
The right arm:
A roobert-hand-assembling-workplace :-)