Daniel
Daniel
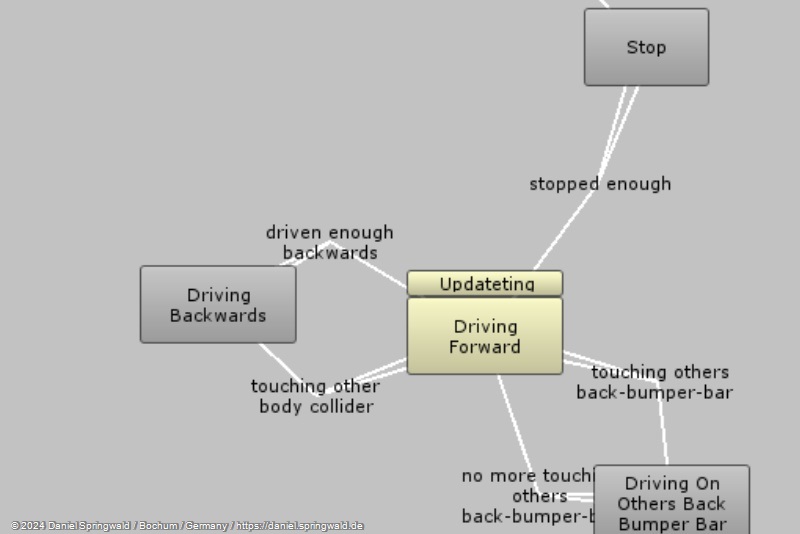
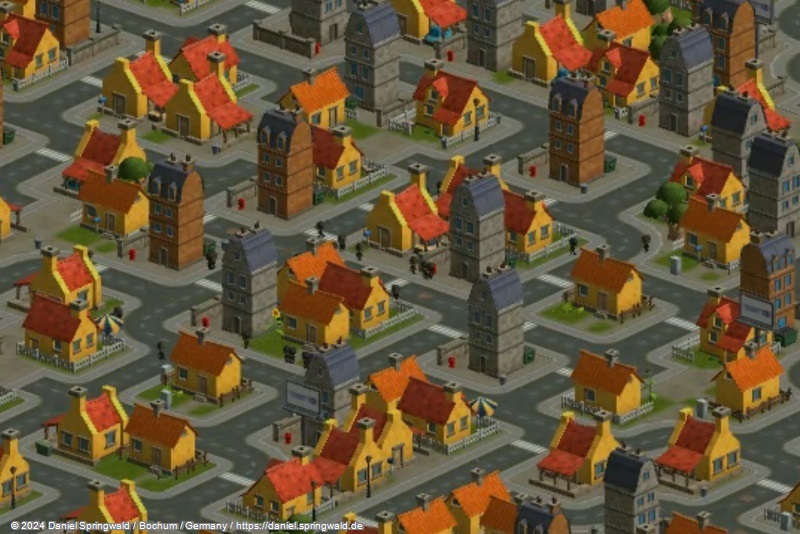
The first approach for pedestrian pathfinding is now implemented. I chose an optimized version of the A* pathfinding with the jump point search algorithm. (
For the vehicle implementation I used the Dijkstra algorithm, but this seems to be too greedy for the pedestrian pathfinding).
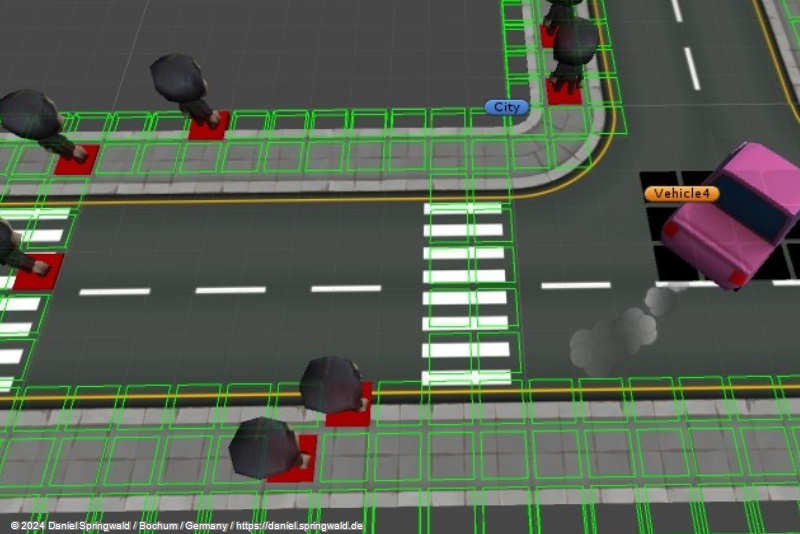
Collision detection and animation are still missing so the walk looks a little bit like a robot on roller-skates.