Daniel
Daniel
RC servos are controlled via a PWM signal. The PWM signal can be generated for example via a digital pin of the Arduino or ESP32. The length of the signal in microseconds determines the position of the servo. Most of these servos do not have a 360° rotation, but mostly only a range of 180° or even a few degrees more.
Unfortunately, the translation of signal length to servo position varies depending on the model. Often the manufacturers do not specify the values at all. To determine the signal duration in microseconds for the two end positions and the corresponding angles, I have developed the tool ServoSensei based on ESP32.
The following table shows as a cheat sheet the signal lengths and other information of the servos I have already tested. The signal lengths are given in microseconds. The angle ranges are given in degrees.
All data are without guarantee and correspond to the values determined by me practically.
| Manufacturer / Model | Signal min | Signal max | Range | Image (click to zoom) | Notes |
|---|---|---|---|---|---|
| AGF-RC / C1.5CLS PRO R (9MM) | 710 | 2300 | 9mm |   |
|
| BLUE BIRD / BMS-630MG | 790 | 2140 | 150° |   |
|
| DSSERVO / DS3218 MG | 370 | 2620 | 210° |   |
|
| GOTECK / GS-9018 | 580 | 2500 | 180° | 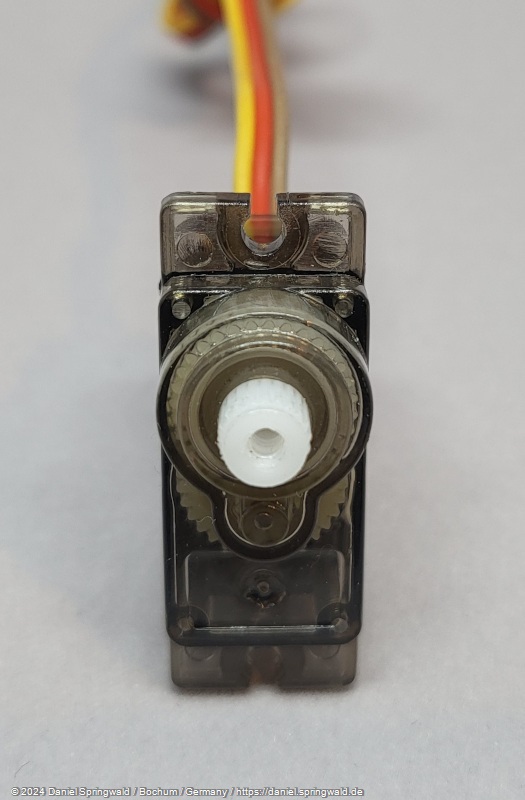 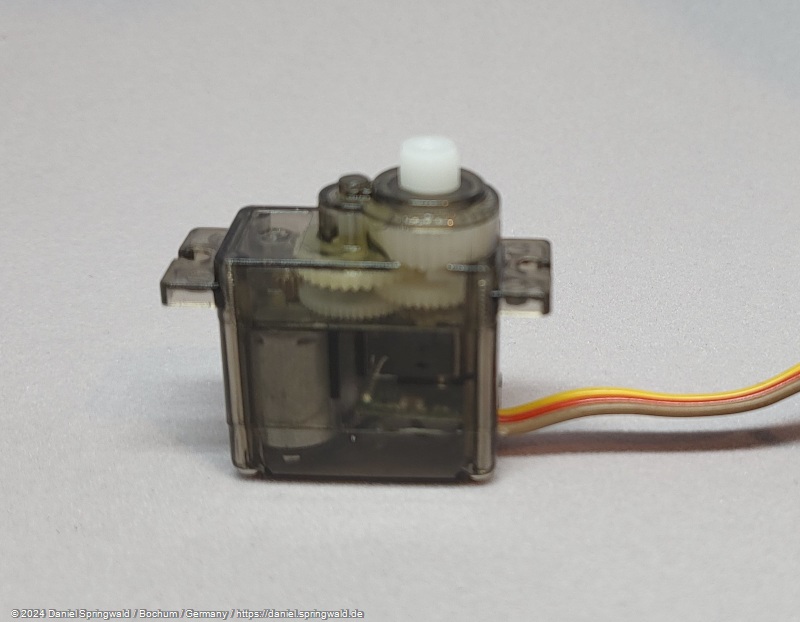 |
|
| Guo Hua / 9g A0090 | 430 | 2580 | 200° |   |
|
| GWS / S35-STD | 1000 < 1490 | 1490 > 2200 | endless |  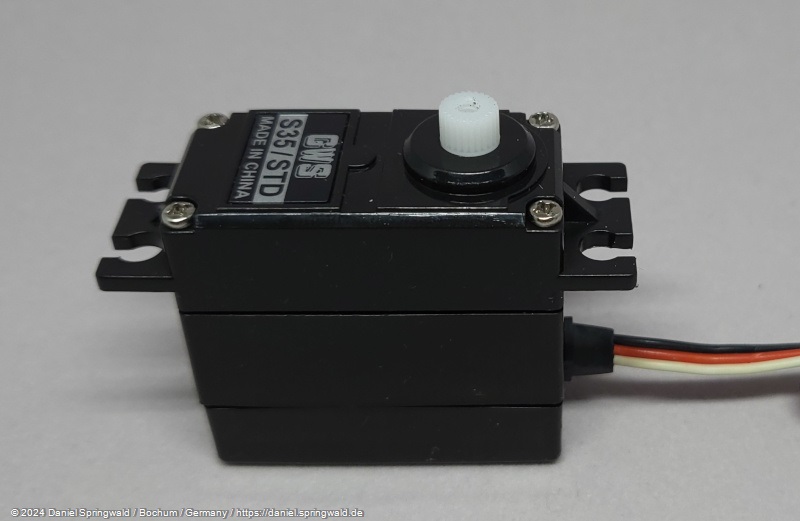 |
speed by signal |
| HiTec / HS-422 deluxe | 450 | 2510 | 200° |   |
|
| HJ / S3315D Robot Servo | 480 | 2580 | 200° |  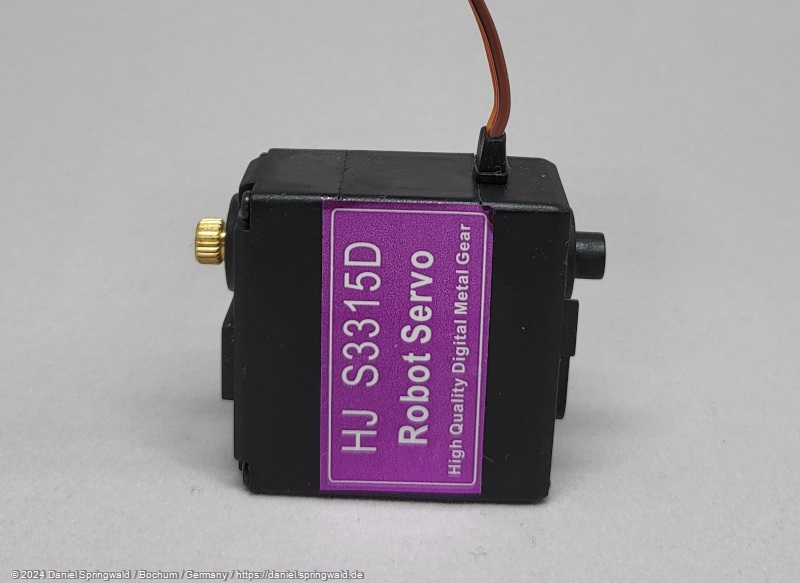 |
|
| LongRuner / LKY61 | 500 | 2480 | 180° | 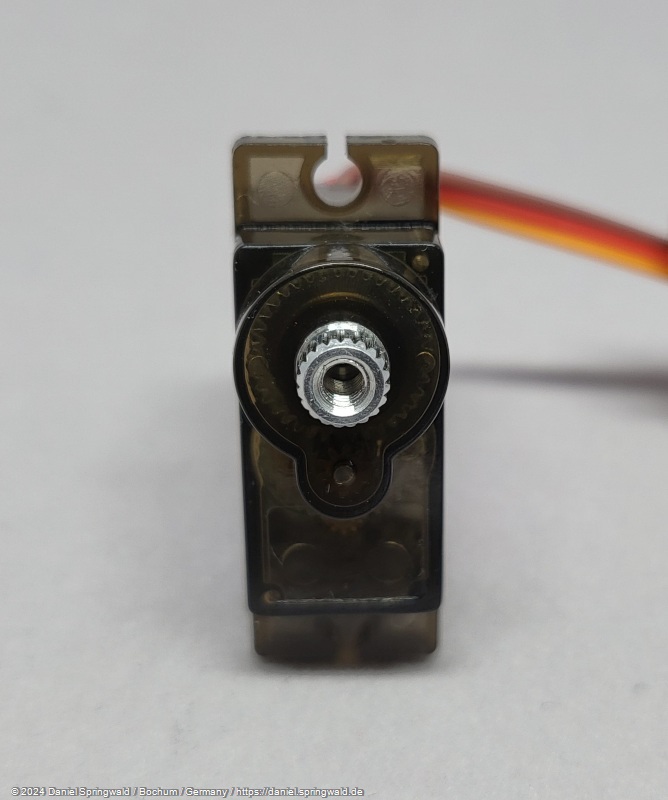  |
|
| Magic-Q / QDS-15RO | 600 | 2360 | 220° |   |
|
| Miuzei / SG90 MS 18 | 480 | 2500 | 190° |   |
|
| MODELCRAFT / 0112 | 550 | 2200 | 210° |   |
|
| MODELCRAFT / VSD-1 | 820 | 2150 | 130° |   |
|
| SPRINGRC / SR-402P | 430 | 2450 | 170° |   |
|
| TowerPro / MG90D DiGital | 710 | 2280 | 155° |  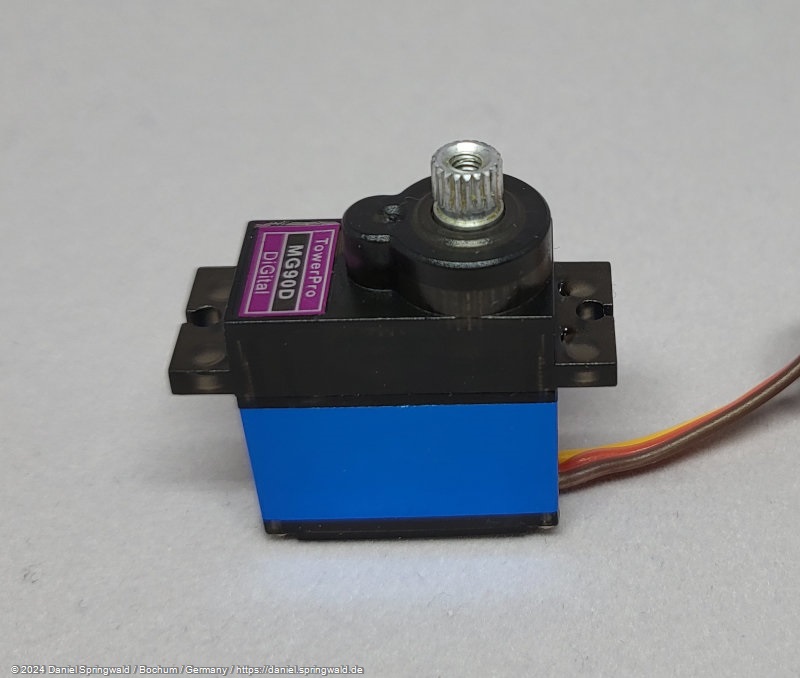 |
|
| TowerPro / MG995 | 500 | 2500 | 180° |  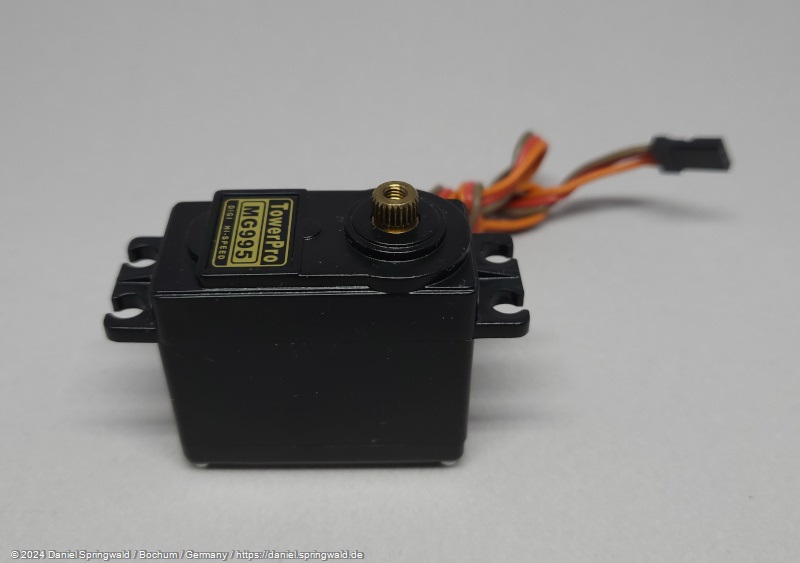 |
|
| TowerPro / SG92R | 480 | 2490 | 190° | 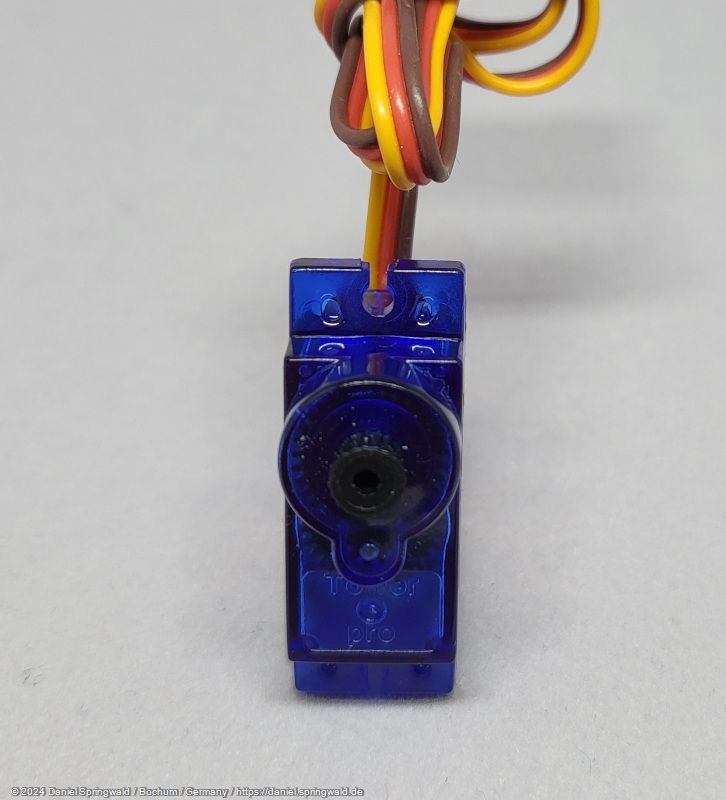  |
|
| Waveshare / WS-MG996R | 360 | 2600 | 210° |  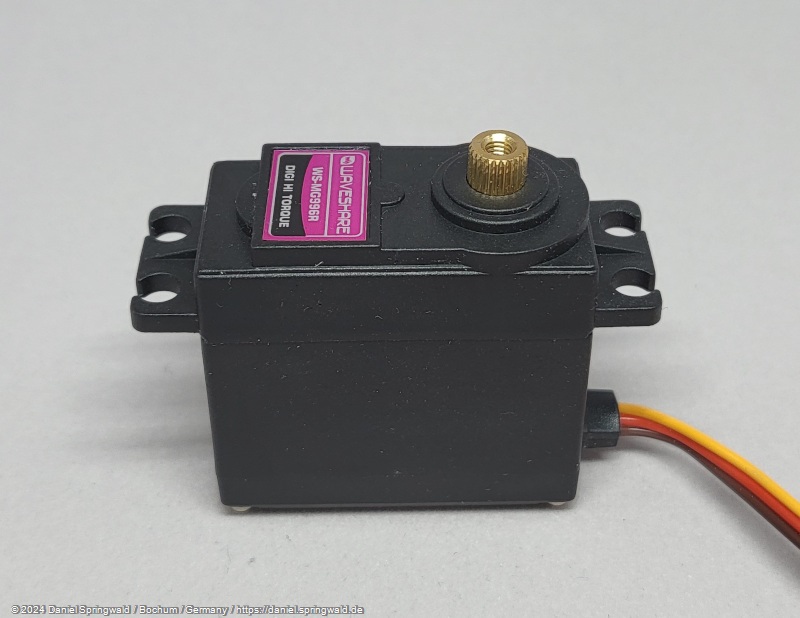 |
|
| ? / W4505-4T | 200 < 460 | 460 > 600 | endless |   |
fixed speed |
Feedback
If you want to add a servo, please send me an email with the appropriate information and ideally a photo of the servo. I am also happy about hints for errors or improvements.
ServoSensei
The ServoSensei is a small tool that determines the signal length in microseconds for the two end positions and the corresponding angles. It can also be used to calibrate the real MHz frequency for a PCA9685 PWM chip. The manufacturing tolerance in the range of about 23-27MHz has otherwise reflected on the generated signal length.